
Hot New Products Precision Casting Wax for Florence Factory
Short Description:
Product Detail
Product Tags
Hot New Products Precision Casting Wax for Florence Factory Detail:
Precision Casting Wax mainly is used for precision mechanical process with zero allowance or very limited allowance. We can not adopt general casting technique, but can only adopt zero allowance casting or precision casting. Because of the product’s structure is very delicate and complex especially in bejeweled with golden and silver, such as diamond ring, brooch, earring etc.
The characteristics of precision casting wax are: good coating property, no denaturalization to be heated, good flow ability, good thermal stability, and well surface finish.
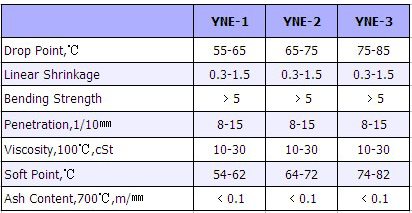
Product detail pictures:

With a sound enterprise credit history, exceptional after-sales services and modern production facilities, we've earned an outstanding track record amongst our consumers across the whole world for Hot New Products Precision Casting Wax for Florence Factory, The product will supply to all over the world, such as: kazakhstan, Kuala Lumpur, Bogota, Strong infrastructure is the need of any organization. We are backed with a robust infrastructural facility that enables us to manufacture, store, quality check and dispatch our products worldwide. To maintain smooth work flow, we have sectioned our infrastructure into a number of departments. All these departments are functional with latest tools, modernized machines and equipment. Owing to which, we are able to accomplish voluminous production without compromising upon the quality.
How to fix and replace a thermostat for a GM 3400
Pontiac Aztek Grand Am Montana
Buick Rendezvous
Oldsmobile Silhouette Alero
Chevrolet Venture Monte Carlo





